
Build Season Week 5 has been lively! Our team has been working hard to assemble and complete the manufacturing for our competition robot and create systems for use in the season
Programming
The programming team accomplished many goals this week. Our biggest hurdle was wiring all of our subsystems – the shooter, drivetrain, and intake mechanism. We successfully wired our drivetrain & shooter, and are eagerly awaiting the Build subteam’s completion of the intake & climber. Next we will wire those up as well.
One of our goals this season is to have a fluid autonomous routine, so our robot can execute commands without user input. This is primarily meant for the first fifteen seconds of the match, but it will also make the driver’s job a lot easier. We’ve been heavily focused on code for our ring shooter, and various methods to interact with it. The plan is to be able to shoot from anywhere on the field, and hopefully while moving the robot as well.

We have made some strides in our vision system, which orient the robot’s location. To do this our team will use AprilTags (QR code-esque markers positioned around the field) to help the robot estimate its position. This will be helpful when executing autonomous routines, as the robot will be able to go to a specific location since the programming allows it to know where it currently is oriented on the field. The subteam has been tuning our setup to read the AprilTags consisting of four cameras positioned around the robot, and it is starting to show some promising results!
Build Team
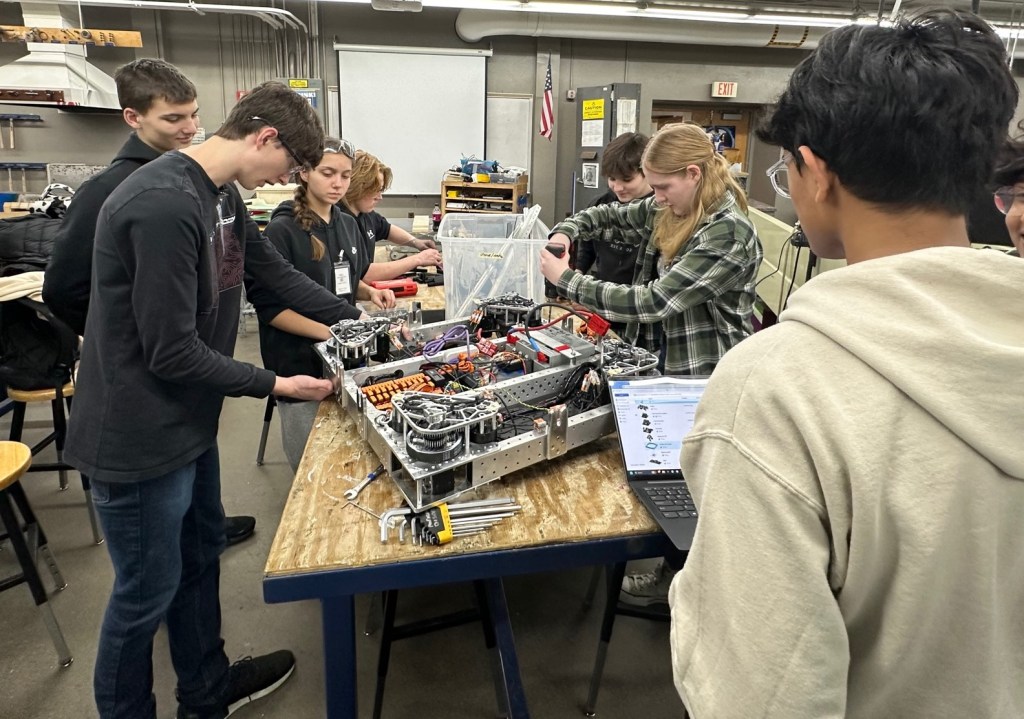
This week the build team has been hard at work manufacturing and assembling parts we need to make our robot subsystems functional. We have made a lot of progress on the robot’s shooter and climbing arms, and are miles ahead of last year’s progress.
Drivetrain and Bumpers
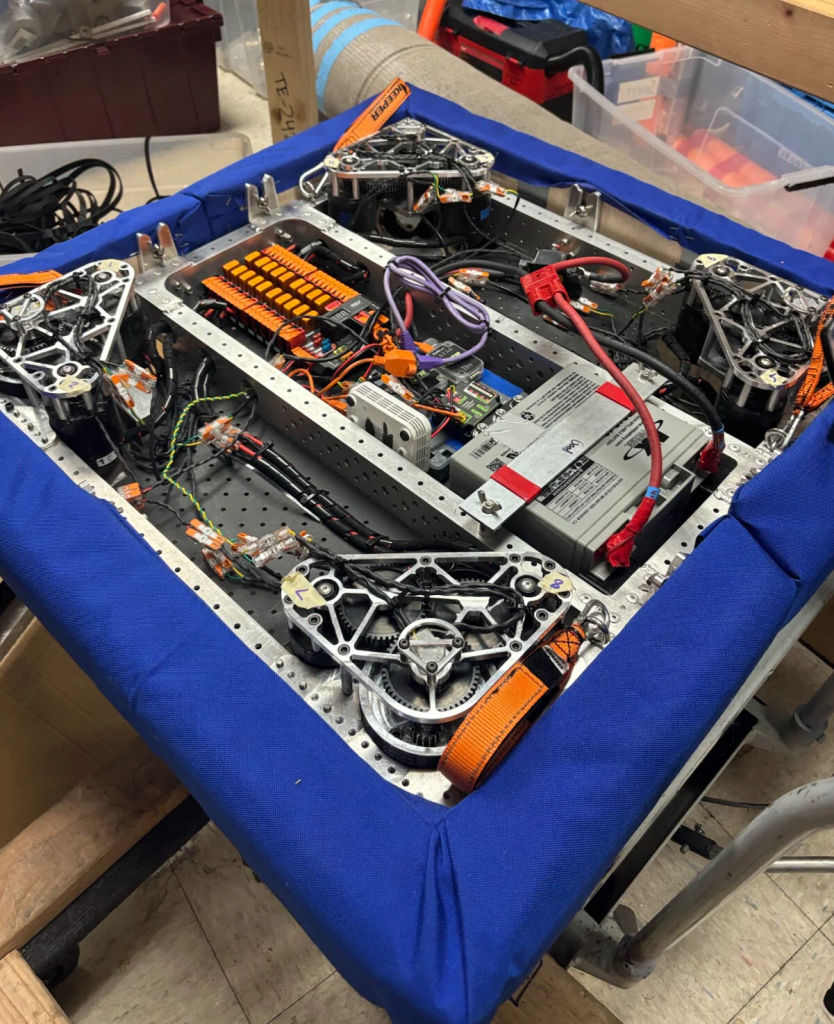
In previous weeks, we built the robot’s bumpers and drivetrain. We have a few new features this year which include lifting straps which will allow us to easily move the robot on the field, and a new wiring system which uses Wago connectors that should greatly increase our reliability. Along with that, we prepared the wiring harness to use several rotation and distance sensors which will be used on each of the subsystems to control our robot autonomously.
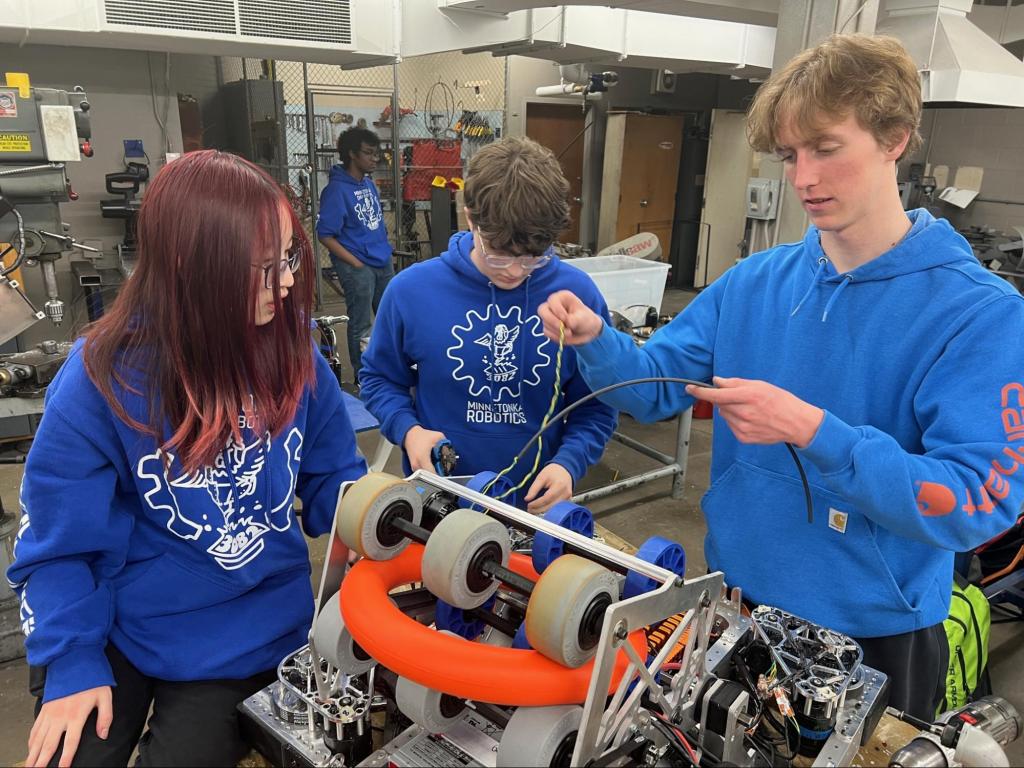
Ring Shooter
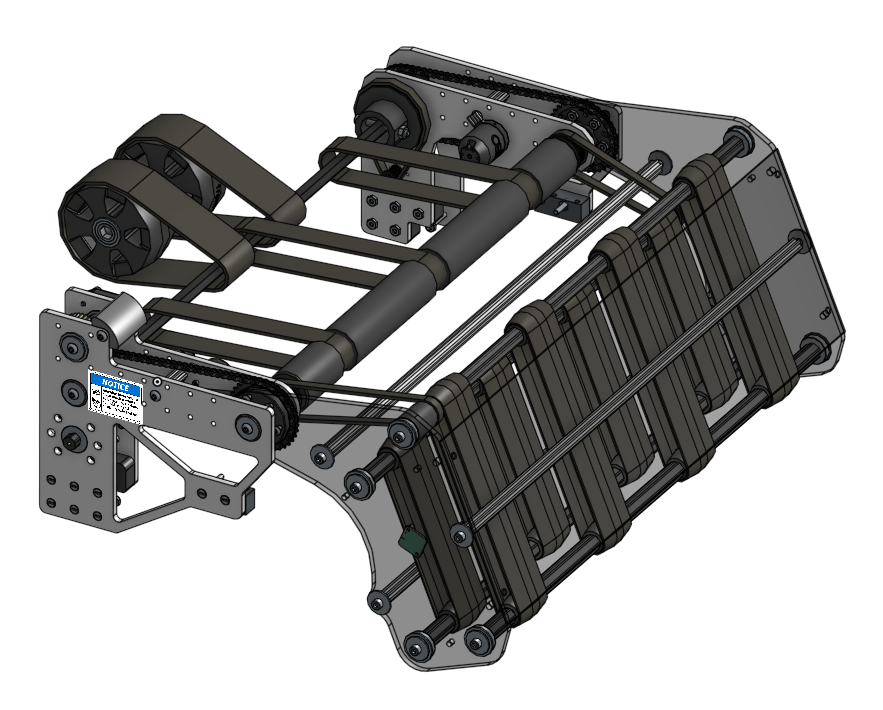
The build team made the ring shooter in two meetings, which featured two motors to drive the shooting. This provides the potential to vector the top and bottom rows of wheels to be able to change the rings angle as it leaves the last row of wheels. We have a laser sensor near the entrance of the shooter which will let us know if the piece has left or entered the shooter. We also have a chain driven pivot that allows for angling the system anywhere from 17 to 65 degrees.

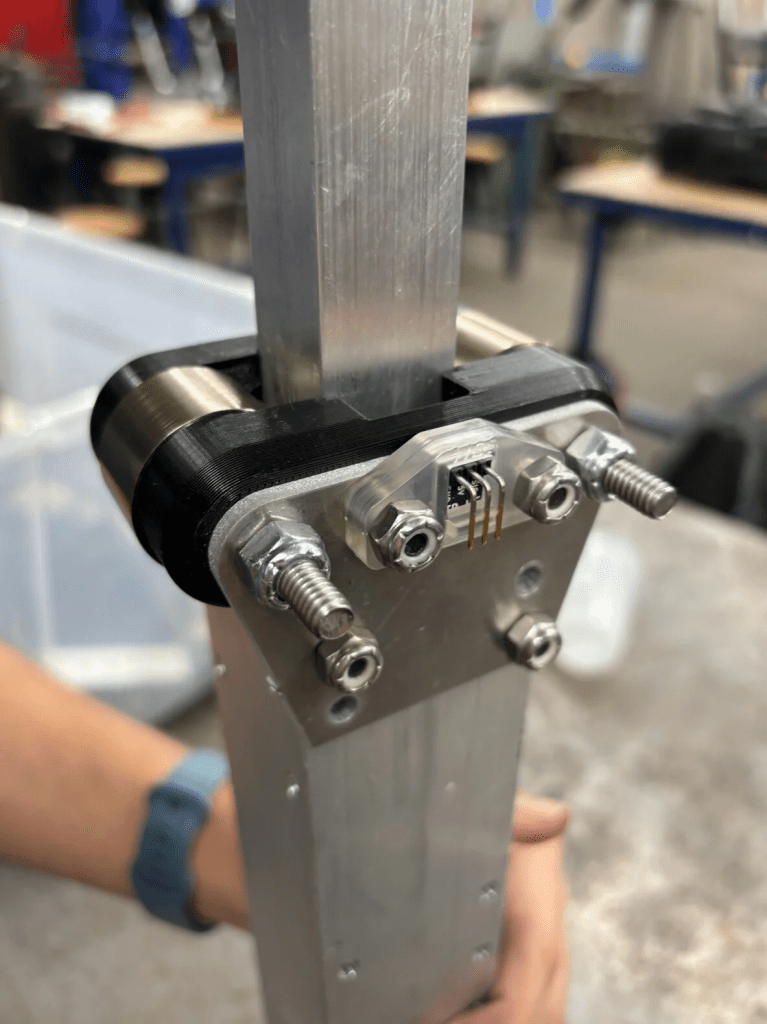
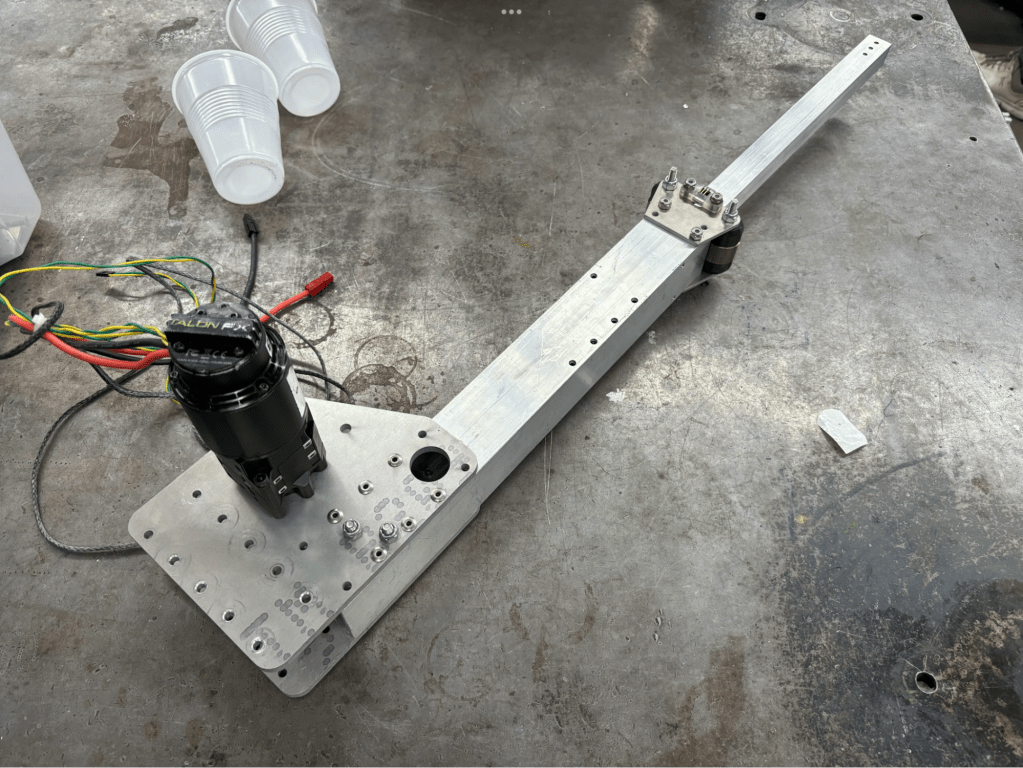
Climbing arms
This week we completed the two climbing arms which will lift the robot off the floor at the end of each game. We are using two hall effect sensors (magnet sensors) to zero each arm before the match to get consistent position data. Two six-pound constant force springs extend the arms up and a winch capable of pulling over a thousand pounds retracts each arm. We are hoping to achieve even more accuracy when climbing by using our onboard gyroscope to tune the speed of the pull as we are climbing to stay level. The climb should be very fast, our estimates show that we should be at our maximum height in just 2 seconds. We are also using brake mode on our brushless motors to resist the robot from falling off the chain at the end of the match.
Intake
Lastly, we worked on our intake system to pick up game pieces. We are working on assembling everything needed for this subsystem. For it we have used ¼ inch thick polycarbonate arms which are impact resistant, as this material is sometimes used in bullet resistant glass. We expect the system to actuate from 0 to 90 degrees in just a quarter of a second, and it has an additional laser sensor on one of the arms to detect if a piece has been sucked in which will be useful during the autonomous period.

Chicken Bot Pie would like to thank our sponsors for their support and encouragement. Without them, all of this would not be possible. Thank you!!
Until next week,
Milan Darji, Operations Captain
Celeste Hill, Head Coach
Minnetonka Robotics / Team 3082 / Chicken Bot Pie
